
モータ制御実習装置
モータ制御実習装置
KENTAC 2140
★モータ駆動のモデルベース開発が学習できます。
★ブラスレスモータの駆動学習ができます。
★直流モータの駆動学習ができます。
★モータ動作の検証(通信によるデータ収集が可能)
特 徴
○Matlabを使用した直流、ブラシレスモータの速度制御、トルク制御が学習できます。
○ブラシレスモータ動作の計測できます。
○KENTAC 5100の電動車両とインバータ構成がほぼ同一なので、電動車両の事前のモータ学
習が可能です。
学習項目
(1)直流モータの駆動学習
(2)直流モータの速度制御
(3)ブラシレスモータの駆動学習
(4)ブラシレスモータの特性試験
(5)ブラシレスモータのプラグラミング学習
(6)Matlabを使用してのプログラム学習(Matlabは別途ご用意下さい)
シミュレーションとプログラムの自動生成及び実機動作の検証(通信によるデータ収集も可
能)を行うことができるのでモデルベースによる開発工程の実習ができます。
仕 様
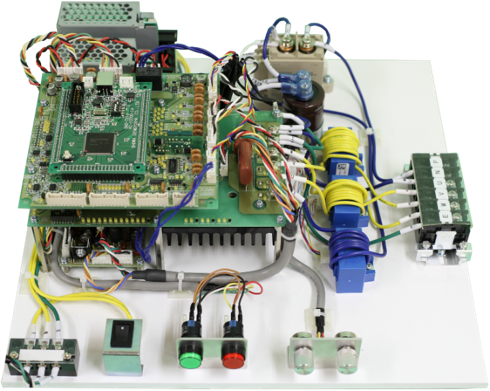
○インバータ
・CPU部
CPU :SH2A-7216
クロック :12.5MHz(内部200MHz)
内蔵ROM :1MB
内蔵RAM :128KB
・インターフェース部
電流センサ :2個
外付VR :2個
アナログ入力:3点
デジタル入力:8点
デジタル出力:8点
ホール素子/エンコーダ入力 1点
PWM出力 :3相1軸PWM(6bit)
・ドライバー部
IPM :600V,30A
IPM制御回路(アームショート防止回路)
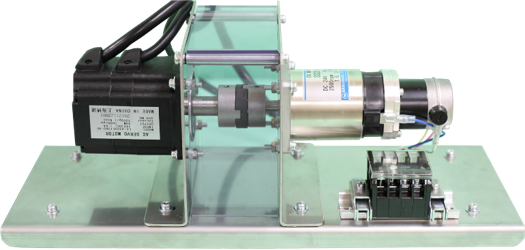
○モータ
・ブラシレスDCモータ:24V,1.6A,3000min-1
・DCモータ :24V,1.1A,2500min-1
○上記モータ用MG架台
○DCモータ用負荷装置
〇寸法
インバータ寸法:約350(W)×350(D)×145(H)mm
・重量 約3.7kg
モータ架台寸法:約350(W)×140(D)×140(H)mm
・重量 約3kg
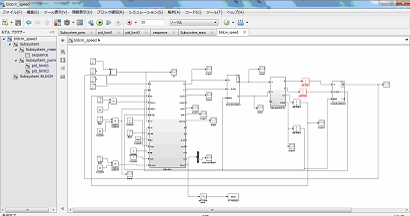
Matlab/Simlinkのブロックダイアグラム