
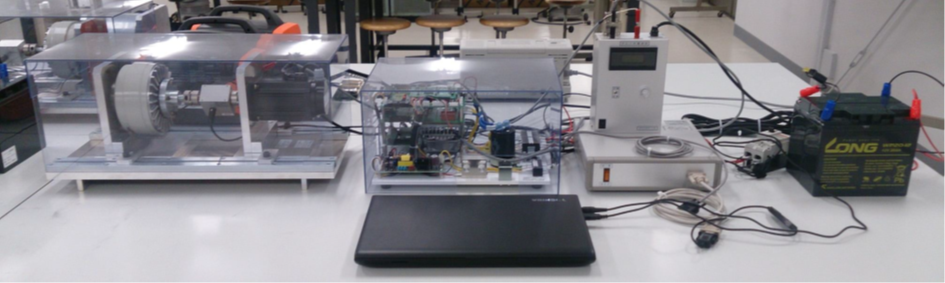
回生エネルギー実習装置
回生エネルギー実習装置
KENTAC 6920
特 徴
〇EVモータ駆動制御の実験が可能
・ブレーキ負荷に対するモータ駆動の実験
・トルク制御、速度制御の違いを実験
〇EVモータの特性測定実験が可能(トルク制御、速度制御)
・モータに供給される三相電力、慣性モーメント、加速度の実験
・システムの運転効率の測定
〇エネルギー回生実験が可能
・モータの回転速度に対する回転エネルギーと回生電力の測定
・慣性モーメントに対する回転エネルギーの関係を算出しそのエネルギーがバッテリーまた
はキャパシタに回生する手法と回生できるエネルギーの関係が学習できます。
〇PC画面上でのアプリケーション操作ソフトと動作パターンファイル変更によりモータ動作を
簡単に変更可能
〇Simtrol-mやCプログラムを使用して、PIDの制御定数より詳細なモータ動作の変更が可能
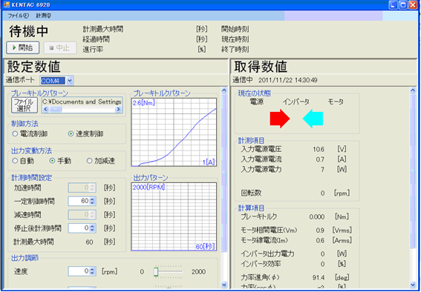
PC画面上でのアプリケーション操作ソフト
学習項目
(1)EV用モータ駆動制御と負荷との関係を学習
・ブラシレスモータの駆動方法
・センサの原理(レゾルバに加える交流波形と出力波形観測)、
ABZ変換波形(マイコンで読み込むための波形観測)
・モータ制御の為のPWM出力波形観測
・モータを駆動する技術とブレーキトルクとの関係を学習
※波形観測用のオシロスコープ等はご用意下さい
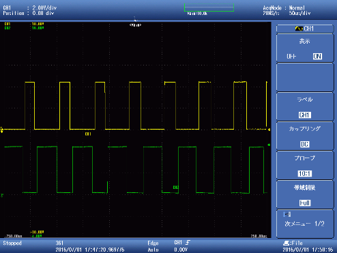
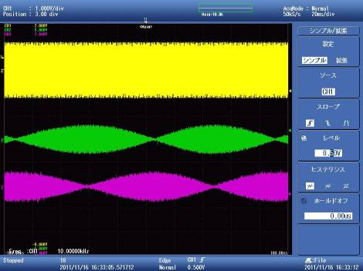
相補PWM波形 レゾルバ信号波形
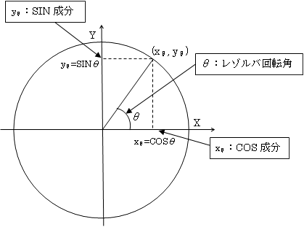
tanθ = yθ/ xθ
θ = tan-1(yθ/ xθ)
(2)EV用モータの特性測定の学習
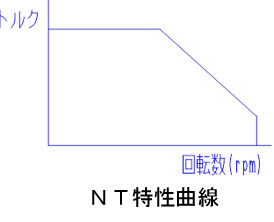
・トルク制御特性試験の学習
NT特性曲線の測定
・速度制御特性試験の学習
NT特性曲線の測定
・速度制御とトルク制御の違いを学習
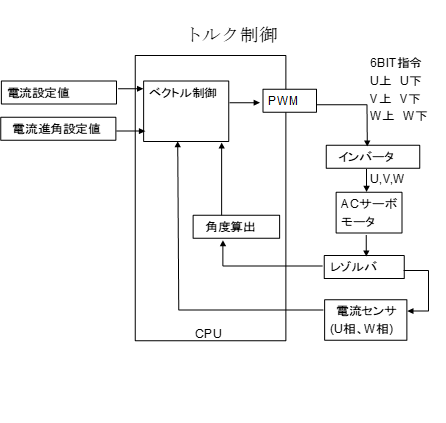
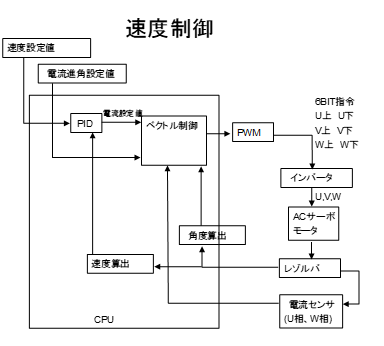
トルク制御ブロック図 速度制御ブロック図
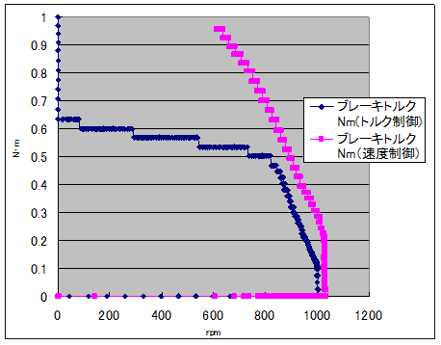
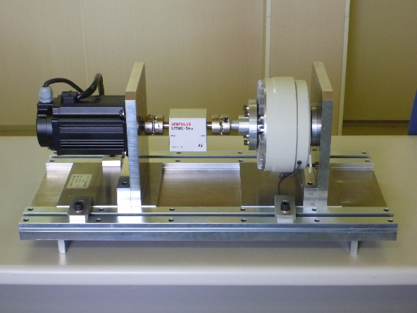
トルク制御と速度制御のNT特性 モータとブレーキとトルク計の構成例
(3)EV用モータの回生エネルギーの学習
・フライホイールをモータによって回転させて、回転体にエネルギーを蓄積する学習
・回生によって電気エネルギーに変換させ電力が蓄電デバイスに供給されることの学習
・蓄積用の二重相コンデンサやバッテリを使ったシステムの場合、蓄電されることで電圧が上昇しエネ
ルギーが回生されたことの学習
◇力行と回生時の特性グラフ
計測システムで計測した項目をパソコンに数値データ(CSV値)で格納します。
CSV値を表計算ソフトでグラフ化したイメージです。
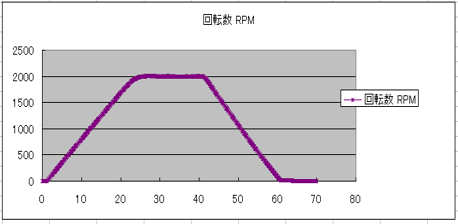
・回生実験時の速度変化の
グラフ
この実験では速度制御によりフライホイールの回転速度を約20秒間で2000rpmまで上昇させます。
約20秒の定常状態を経て、約20秒でフライホイールが停止するまでブレーキをかけて回生状態にします。
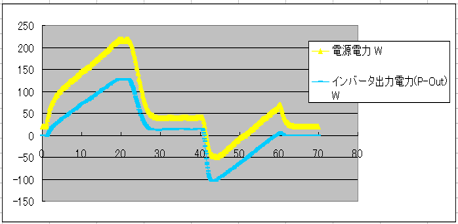
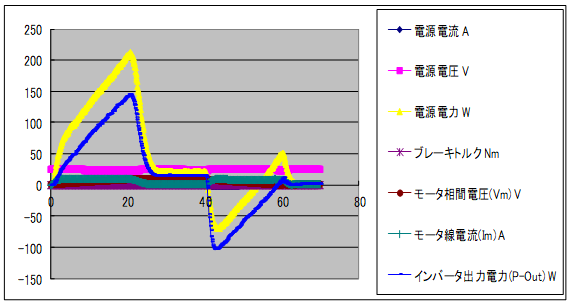
・直流の電源電力と
インバータ電力のグラフ
フライホイールを2000rpmまで上昇させている間は力行が行われ、電源電力、インバータ電力ともプラス方向の電力が消費されていますが約20秒の定常状態を経て約20秒でフライホイールが停止するまでブレーキをかけて電力がマイナスで回生状態になっています。
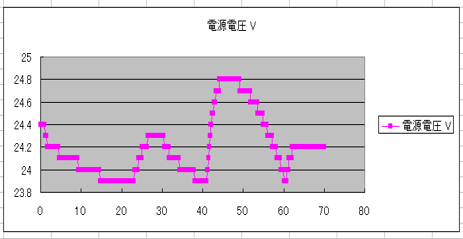
・直流の電源電圧の
推移グラフ
力行状態の約20秒までは、直流電圧が下がり、その後定常状態となって電圧が上昇してます。
約30秒で電源からの電力供給を絶っているので、2重相コンデンサのエネルギーが消費され電圧が下がりますが、約40秒から回生動作に入りコンデンサ電圧が上昇し、回生によりエネルギーが蓄電されているのが確認できます。
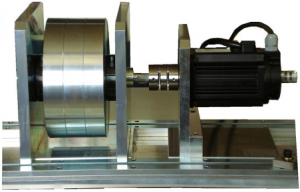
フライホイールとモータ
(4)モデルベース開発環境 Simtrol-mによるシミュレーションとプログラムの変更、
PID定数の変更等の学習
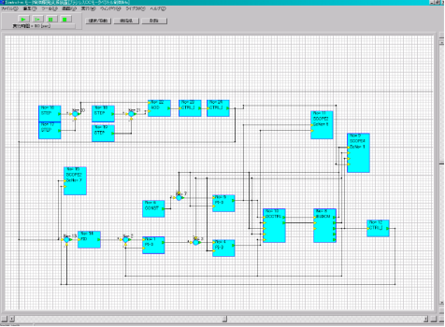
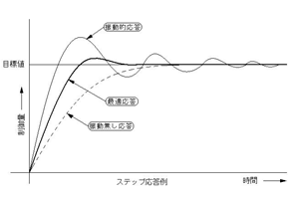
Simtrol-mで作成モータ用制御ブロック図 PID定数変更による応答のイメージ図
C言語生成→機械語にコンパイル→CPUにダウンロード→運転
仕 様
標準装備
〇実験用モータ :DC24V,バッテリ駆動用永久磁石同期モータ
200W,2000rpm,センサ レゾルバ
〇回生用フライホイール:3枚構成(鉄製)
〇実験用架台 :アルミ製(550~850) オプションによって長さを可変
〇インバータ :CPU SH2 7085
IPM(600V,30A)
電流センサ 入力側(1台) 出力側(2台)
±200A/0.625V~4.375V
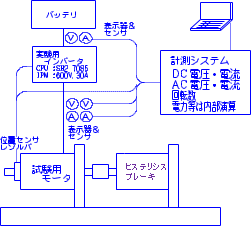
〇計測システム :CPU SH2 7216
DC側・AC側電圧・電流センサ・電圧・電流・電力・回転数を計測
パソコンにCSV形式にて格納
〇負荷装置 :ヒステリシスブレーキ
〇ブレーキ電源 :24V,1A
〇操作画面ソフト(PC用)
〇モータ制御開発支援システム
〇サンプルプログラム(インバータ制御用)
〇寸法
実験用モータ架台:約190(W)×150(D)×185(H)mm 約6kg
回生用フライホイール付架台:約230(W)×200(D)×260(H) 約33kg
実験用ベース架台:約550~800(W)×250(D)×60(H) 約16~23kg
インバータ寸法:約350kg(W)×250(D)×170(H)mm 約3.5kg
計測システム:約260(W)×280(D)×75(H)mm 約3kg
モータ負荷装置(パウダーブレーキ):約150(W)×150(D)×185(H)mm 約7kg
ブレーキ電源:約107(W)×345(D)×150(H)mm 約5kg
ユニポーラ電源:約430(W)×460(D)×230(H)mm 約16kg
2重層コンデッサ:約300(W)×300(D)×130(H)mm 約5kg
バッテリ:約180(W)×76(D)×167(H)mm 約6kg×2台
充電器:約290(W)×140(D)×180(H)mm 約2.5kg
位置センサ(エコンダ)架台:約70(W)×150(D)×140(H)mm 約0.8kg
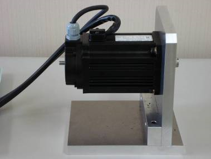
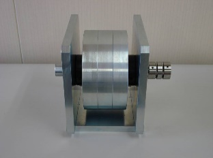
実験用モータ フライホイール ヒステリシスブレーキ



ブレーキ用電源 計測システム モータ用ベース

インバータ
〇電源システム:Ⓐ又はⒷを選択して下さい。
Ⓐユニポーラ型電源及び2重層コンデンサ(電源:30V,±10A コンデンサ:26.6F(5直列))
Ⓑバッテリ(充電器付)及び過電流保護遮断器(12V産業用シールバッテリ×2台)
※回生により電圧が上昇したことの計測にはⒶユニポーラ型電源及び2重層コンデンサが適し
ています。
Ⓐ 
ユニポーラ型電源 |
Ⓑ 


バッテリ 遮断器 充電器 |
オプション品
〇トルク計 :小野測器製(5Nmトルク計、及び架台)
またはユニパルス製(軸に固定、架台必要なし)
(トルク計を付ける場合はPC画面ソフトウェアがトルク計測用になります)
〇位置センサ :エンコーダ(両軸仕様のモータ、エンコーダ用プログラム付属)

ユニパルス製 |

位置センサ(エンコーダ)