
メカトロラボⅢ
メカトロラボⅢ
KENTAC 2203B
★コントロール部には手動インバータ・MOSFETインバータが付属
★外部に計測器無しで卓上型MGとして使用可能
特 徴
3種類のステータと9種類(10本)のロータを差し替えることにより、各種のモータが実現できます。
下記のモータをカップリングで連結し、MGとして使用できます。
| ◎分散巻ステータ使用で可能なモータ | ◎集中巻ステータ使用 |
| 〇3相交流モータ(非同期モータ) | 〇直流モータ |
| かご形モータ・始動時高トルクかご形モータ | 他励モータ・分巻モータ・直流モータ |
| 渦電流形モータ | 〇3相VR形ステップモータ |
| 〇3相交流モータ(同期モータ) | 〇直流発電機 |
| ヒステリシスモータ・レラクタンスモータ | 〇ブラシレスDCモータ |
| 永久磁石ロータ形モータ | 〇レラクタンスモータ |
| 〇3相交流発電機 | ◎永久磁石フィールドステータ使用 |
| 〇ブラシレスDCモータ | 〇永久磁石フィールド直流モータ |
| 〇レラクタンスモータ | 〇永久磁石フィールド直流発電機 |
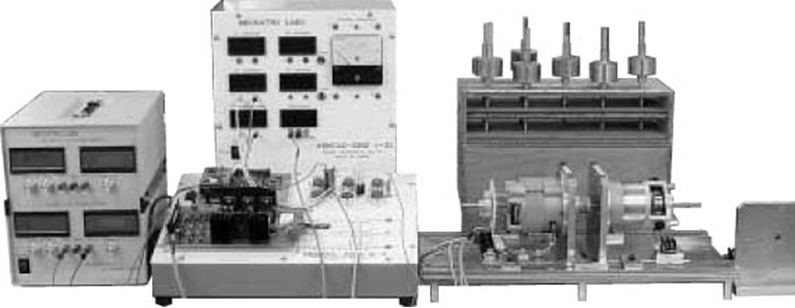
KENTAC 2203Bの構成
〇計測部(KENTAC 2202−I):1台
〇コントロール部(KENTAC 2202−C):1台
〇ステータ部(KENTAC 2203−M):1式
〇電源部(KENTAC 2202−P):1台
〇各種ロータ(木製ボックス付き):1式
〇その他の付属品:1式
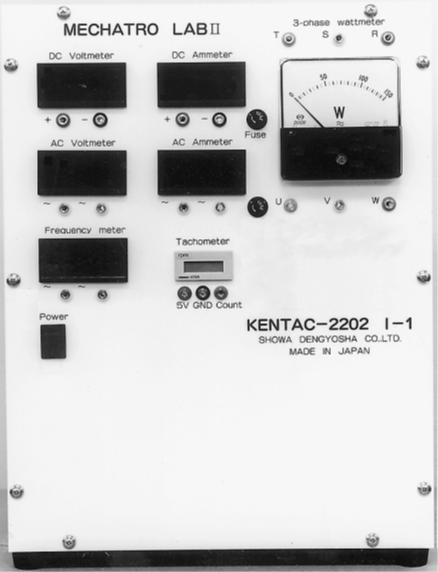
計測部仕様(KENTAC 2202-I)
(1)デジタルDC電圧計:0〜600V
(2)デジタルDC電流計:±19.99A
(3)デジタルAC電圧計:0〜600V
(4)デジタルAC電流計:0〜5.00A
(5)デジタル回転計:0~9999rpm
(6)3相交流電力計:0〜300W
(7)周波数計:0~199.9Hz
(8)電源:AC100V ±10%
(9)寸法:約355(W)×210(H)×470(D) 約10㎏
パソコンによるインバータ制御が可能(I/Oボードが必要)
パソコン制御の仕様はKENTAC 2203-PCに記載。卓上型MGとして学習出来ます。
学習項目
(1)卓上型MGとして学習出来ます
(2個のロータをカップリング連結して、『電動機』−『発電機』として学習出来ます)
例 (各種のMGが実現できます。その内容例を下記に示します。)
(2)かご型インダクションモータ − 永久磁石フィールド発電機
(3)DCブラシレスモータ − 永久磁石発電機
(4)ヒステリシスモータ − 他励発電機
(5)永久磁石フィールドモータ − 他励発電機
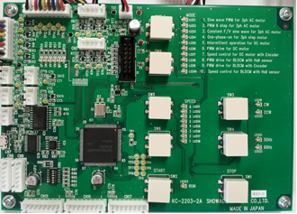
コントロール部の仕様(KENTAC 2203-C)
◯手動インバータ用スイッチ:3個
◯制御用マイコンボード:1台
CPU:ルネサス製RX62G クロック:100MHz
◯MOS FETインバータ回路
MOS FET:6個
◯LC3相フィルター回路
◯電源:AC100V
◯寸法:450(W)×350(D)×220(H) 約8㎏

ステータ部の仕様(KENTAC 2203-M)
〇分散巻固定子:固定子100φ、4極巻
各種交流モータ及びDCブラシレスモータ用に使用
〇集中巻固定子:固定子100φ、6コイル
ステップモータ及び各種DCモータ及び発電機として使用
〇DC専用モータ:固定子85φ、2極電磁石型、DCロータ付き
〇ステータベース寸法:約550(W)×247(D)×55(H) 約16㎏

電源の仕様
◎電源1:モータ励磁用、ブレーキ用等
○出力:第1出力 約DC 0〜18V/0~2A
電圧・電流同時デジタル表示
〇入力:AC100V ±10%
〇寸法:約106(W)×288(D)×144(H) 重量:約4.7kg
◎電源2:モータ駆動用
○出力:DC 0~80V/0~13.5V (但し定格出力360Wで可変)
○電圧・電流同時デジタル表示
○最大寸法:約71(W)×400(D)×137(H) 重量:約3kg
○電源:AC 100V±10%
標準付属品
〇ホールセンサ円形基板 1枚
センサ数 ブラシレスモータ用 3個
回転数計測用 1個
〇4ポール円形磁石およびホルダー 1個
〇カップリング 2個
〇エンコーダ 1台 (モータ間用1個、エンコーダ用1個)
〇負荷抵抗器 1台
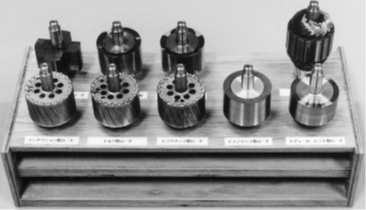
各種ロータ
(1)かご形ロータ(銅リング)
(2)かご形ロータ(黄銅リング)
(3)ヒステリシス形ロータ
(4)エディカレント形ロータ
(5)レラクタンス形ロータ
(6)DC用ロータ(2本)
(1本はDC専用ロータに装着済み)
(7)VR形ステップモータ用ロータ
(8)2極永久磁石形ロータ
(9)4極永久磁石形ロータ
(10)ロータボックス寸法 約430(W)×185(D)×230(H) 約9㎏(ロータ9本含む)
10種類のモータ運転モード
1)インバータによる正弦波駆動(50/60Hz)
2)インバータによる方形波駆動(10~80Hz)
3)インバータによるFV一定の正弦波駆動(10~80Hz)
4)1相励磁ステップモータ(8段階制御)
5)直流モータ間欠運転(8段階制御)
6)直流モータのPWM制御8段階制御
7)直流モータ速度制御
8)ブラシレスDCモータ駆動(ホールセンサ使用、8段階制御)
9)ブラシレスDCモータ駆動(エンコーダ使用のベクトル制御8段階制御)
10)ブラシレスDCモータ速度制御(ホールセンサ使用、8段階制御)
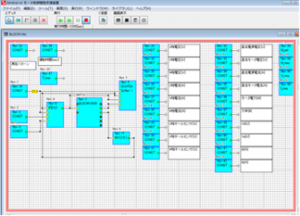
Simtrolでのシミュレーション
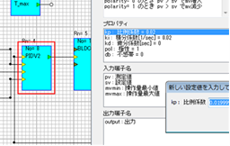
Simtrolを使用してPID定数を変更してシミュレーションすることが出来ます。
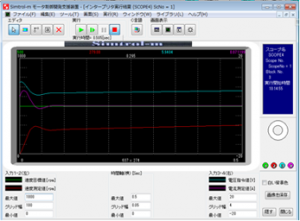
オンライン運転表示運転
USBケーブル経由でパソコンの画面上に現在の運転状況を
リアルタイムに表示させることができます。
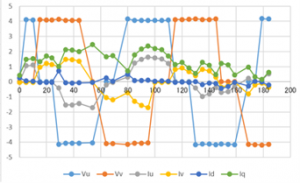
CSV形式ファイルによるグラフ作成
USBケーブル経由で運転中のデータをパソコンに通信しCSVファイルに変換し、
その後でグラフを作成することが出来ます。
メカトロラボⅢのロータとステータ
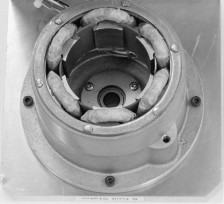
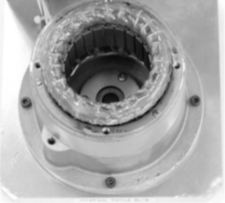
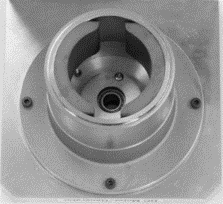
分布巻固定子 集中巻固定子 永久磁石界磁固定子
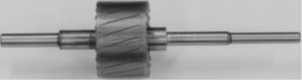
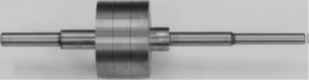
かご形ロータ(銅及び黄銅の2本) ヒステリシスロータ

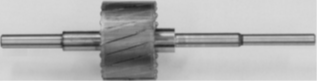
エディカレントロータ レラクタンスロータ

コミュテータ付ロータ VREモータ用ロータ
(直流モータ専用及び交換用の2本付)

2極永久磁石ロータ 4極永久磁石ロータ
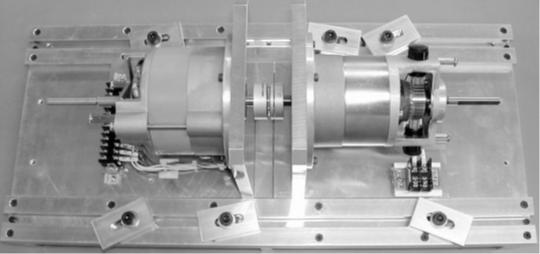
KENTAC 2202の設置例
| オプション類 |
トルク計 K2203B 分巻発電機 界磁調整器 |