モータ制御開発支援システム
モータ制御開発支援システム
Simtrol-m
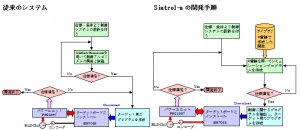
★モータ制御システム開発の時間短縮化支援
★モータ制御のシミュレーションと、C言語ソースファイルを自動生成
★C言語はANSI準拠
★モータ以外のPID制御等のシミュレーションにも使用可能
特長
○モータ制御に必要なブロックがライブラリ化されて用意されています
○各ブロックは内部データを設定出来ます
○ライブラリ内にはハードウェアに依存する関数も存在します。当社製CPUボードに関する関数
(PWM出力・A/D,D/A入出力、 カウンタ入力・I/O入出力等)は登載済み
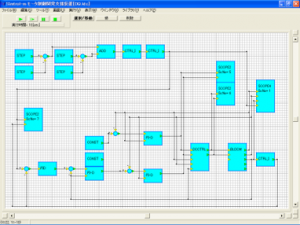
○ライブラリを使用してモータ制御ブロックダイアグラムを構築出来ます。
○ブロック間は線で結ぶと数学的結合が出来ます
○必要と思われる場所にディスプレイ装置を挿入出来ます。
○シミュレーション結果が良好ならコンパイルしてC言語のソースファイルを作成出来ます。
この C言語のソースファイルはANSI-Cでから、ほとんどのCPUのC言語コンパイラで実行可能です。
学習項目
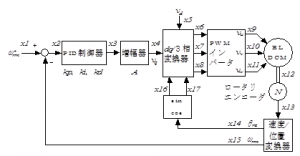
(1) タコジェネレータ付DCサーボモータ
(2) エンコーダ付DCサーボモータ
(3) 倒立振子制御
(4) ホールセンサ付ブラシレスDCモータ制御
(5) ブラシレスDCモータのベクトル制御
仕様
○ ベクトル制御用関数
3相3線→dq変換関数、3相2線→dq変換関数、dq座標系→3相交流変換、
αβ座標系→dq座標変換、dq軸間非干渉化関数, dq座標→αβ座標系変換、
αβ座標系→3相交流変換、3相交流→αβ座標系変換等
○ プロセス制御用関数
PID制御器、PI-D演算器、I-PD演算器、PI演算器、P演算器、I演算器、D演算器、
アンチリセットワインドアップPID制御器、1次遅れ要素(ルンゲクッタ4次法)、1次遅れ要素(オイラー法)
1次遅れ要素(ルンゲクッタ2次法)、2次遅れ要素(ルンゲクッタ4次法)、進み遅れ関数等
○ 演算関数
加算器、減算器、リミット、4入力加減算器、増幅器(乗除算器)、マトリックス演算(2行2列)、
逆マトリックス演算(2行2列)、マトリックス演算(2行3列)、マトリックス演算(3行2列)等
○モータ用関数
ブラシ付きDCモータ(永久磁石励磁モータ、他励モータ、分巻きモータ、直巻きモータ等)、ブラシレスDCモータ等
○信号発生器
ステップ信号発生器、定数信号発生器、正弦波発生器、方形波発生器、三角波発生器、ノイズ発生器、ランプ発生器、
平衡3相交流信号発生器、任意波形発生器等
○ディスプレイ
1入力オシロ機能、2入力オシロ機能、4入力オシロ機能、バーグラフ表示(1入力)、数値表示(1入力)等
○PIO関数
13600用 A/Dコンバータ入力、D/Aコンバータ出力、PWM発生関数、エンコーダ入力発生関数、PIO関数
開発手順
モータ制御への応用例