
DCサーボモータ実習ユニット
DCサーボモータ実習ユニット
KENTAC 832
★マイコン(KENTAC 800Zmk2)をお持ちの方に最適
(マニュアル等解説はKENTAC 800Zmk2に準拠しています)
★デジタル出力機器を接続して1軸テーブルの速度制御、位置決め制御の実習ができます。
★DCモータのPWM方式サーボ学習に最適
特 徴
○アナログ方式
PWM制御とアナログサーボ増幅器の学習が出来ます。
○サーボ増幅器
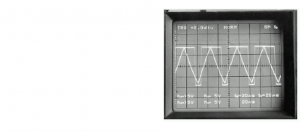
偏差カウンター基板各所に波形観測ピンが立っています。
○サーボモータの速度指令方式に3通りの方式があります。
・マイコンからD/Aコンバータを通しての速度指令
・内部ボリュームの電圧変化による速度指令
・偏差カウンタからD/Aコンバータを通しての速度指令
○位置決め制御は2通りの方法で制御できます。
・ 偏差カウンタをマイコンのソフトウェアによって作成する方法
ソフトウェアの非常に良い学習になる
・本装置内に装備されている偏差カウンタを使用する方法
市販のサーボモータはこの方法を使用した制御が多い。
学習項目
(1)サーボ増幅器の原理
(2)サーボモータの速度の制御
(3)サーボモータの位置決め制御
仕 様
○DCモータ :±12V,10W, ±3000rpm
○エンコーダ :A,B相 100PPR
○テーブル移動距離:約150mm
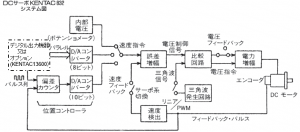
○主回路 :三角波発生回路,サーボ増幅器,F-V変換機
:誤差増幅回路,速度増幅回路,8ビットD/A変換機
:12ビット偏差カウンター,溜りパルス表示器
○内部電源 5V,±12V,±15V
○電源 AC100V,50/60Hz
○寸法 約500(D)×240(W)×110(H)
○重量 約4.9kg
★既にKENTAC 832をお持ちの方はKENTAC 13600とSimtrol-mを購入して頂ければ
KENTAC 833にバージョンアップ出来ます