電動三輪車実習装置
電動三輪車実習装置
KENTAC 5300

★Matlabを使用したモデルベース開発の実習ができます。
★2軸制御電気自動車について実習できます。
★EVモータ駆動制御の実習ができます。
★トルク制御/速度制限と操舵制御が容易な電動車両です。
★回生エネルギーの実習ができます。
学習項目
(1)ブラシレスモータ(ホールセンサ)の駆動学習
(2)2軸制御インバータについて実習
(3)C言語によるモータ制御の学習
(4)回生エネルギーの学習
(5)Matlabを使用してのモデルベース開発実習
*Matlab/Simlinkは別途ご用意下さい
仕 様
〇3輪車仕様:定員1名,最高速度6km/h,積載重量(運転者含む)100kg以下
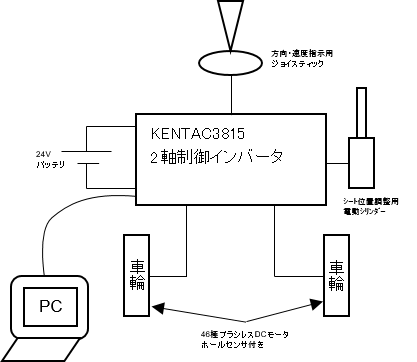
〇制御部 2軸制御インバータ KENTAC 3815
CPU RENESAS製 SH2A-7216
通信 RS422,CAN
モータ制御プログラム書き込み:USB又はE10AUSB(オプション)
PWM出力 3相2軸PWM,FET 55V80A×12
*詳細は2軸制御インバータKENTAC 3815をご覧下さい
〇ソフトウェア モータ制御開発支援システム(Simtrol-m-V02)付
Matlab/Simlink(2014a以降)と併用しシミュレーションと プログラムの自動生成
及び実機動作の検証(通信によるデータ収集も可能)とモデルベースによる開発工程
の実習が可能。
2軸トルク制御プログラム(Matlab/Simlink用ソース,C言語ソース公開)
〇標準操作端末:ジョイステック(前後,左右指示)を標準実装。
〇駆動部:ホイールインモータ2台(24Vで使用)
46極ブラシレスDCモータ(ホールセンサ付き)
24V 500W トルク17.7Nm
タイヤ直径約430mm
〇後輪 オムニホイール(WESN:トヨタ自動車東日本株式会社製全方向タイヤ)
〇シート高さ調整用電動シリンダー(ストローク150mm,位置センサ付き)
○蓄電池:鉛シールバッテリ 12V,20Ah×2個
Matlab/Simlinkのブロックダイアグラム